Собираем квадрокоптер с камерой своими руками. Как собрать квадрокоптер своими руками: инструкция по сборке самодельных квадроптеров и дронов Как сделать квадрокоптер в домашних условиях
Чтобы собрать квадрокоптер своими руками в домашних условиях, следует сначала разобраться в базовых компонентах квадрокоптера.
Детали для сборки квадрокоптера
- Каркас квадрокоптера Diatone Q450 Quad 450 V3 PCB Quadcopter Frame Kit 450mm (последние три цифры в названии Q450 указывают на расстояние между моторами в мм по диагонали). Представляет собой корпус летательного аппарата, который будет использован для монтажа всего прочего оборудования и электронной начинки. Состоит их 4 лучей и печатной платы. Вес 295 грамм.
Banggood.com
Цена 922 руб.
- Мотор DYS D2822-14 1450KV Brushless Motor. 4 штуки.
Продается в интернет-магазине Banggood.com
Цена 571 руб/шт

- Регулятор DYS 30A 2-4S Brushless Speed Controller ESC Simonk Firmware для регулирования оборотов и контроля скорости. 4 штуки.
Продается в интернет-магазине Banggood.com
Цена 438 руб/шт

- Пропеллеры DYS E-Prop 8x6 8060 SF ABS Slow Fly Propeller Blade For RC Airplane, 4 штуки. Два пропеллера правостороннего вращения и два левостороннего.
Продается в интернет-магазине Banggood.com
Цена 125 руб/шт

- Модуль управления квадрокоптером KK2.1.5 kk21evo. 1 шт.
Продается в интернет-магазине Banggood.com
Цена 1680 руб

- Аккумуляторная батарея литий-полимерного типа Turnigy nano-tech 2200mah 4S ~90C Lipo Pack, необходимо готовить минимум две штуки, а лучше четыре, поскольку они быстро садятся. 1 шт.
Продается в интернет-магазине Parkflyer.ru
Цена 1268 руб/шт

- Устройство для зарядки аккумуляторов Hobby King Variable6S 50W 5A. 1 шт.
Продается в интернет-магазине Hobbyco.ru
Цена 900 руб

- Коннектор для подключения аккумулятора XT60 Male Plug 12AWG 10cm With Wire. 1 шт.
Продается в интернет-магазине Banggood.com
Цена 144 руб

- Хомуты для закрепления проводов на корпусе квадрокоптера. 1000pcs 2.0x100mm Black/ White Nylon Cable Ties Zip Ties. 1 упаковка.
Продается в интернет-магазине Banggood.com
Цена 316 руб

- Коннекторы 20 Pairs 3.5mm Bullet Connector Banana Plug For RC Battery / Motor. Для проводов регулятора. 1 упаковка.
Продается в интернет-магазине Banggood.com
Цена 256 руб

- Лента с липучкой для прикрепления аккумулятора к корпусу квадрокоптера. 1 шт.
Продается в интернет-магазине Banggood.com
Цена 79 руб

- Винты 50pcs Motor Fixing Screws Set for DJI F450 F550 HJ450 550 Quadcopter Multicopter. 1 упаковка.
Цена 217 руб

- Пульт управления квадрокоптером Spektrum DX6 V2 with AR610 Receiver. В одном комплекте поставляются приёмник и передатчик. 1 шт.
Цена 9700 руб

Итого комплект оборудования для сборки обойдется в 20018 руб.
Особенности при выборе компонентов

Базовые характеристики передатчика:
- Режимы Mode1 или Mode2. В первом режиме ручка газа находится справа, во втором режиме ручка газа находится слева.
- Частота передатчика составляет 2,4Ггц.
- Число каналов. Минимум каналов, которые требуются для осуществления управления летательным аппаратом - четыре. Управляющее оборудование от Spektrum DX6 V2 with AR610 Receiver содержит 6 каналов.
Пошаговая инструкция по сборке квадрокоптера своими руками
- Уменьшаем длину проводов на регуляторах. При подсоединении регулятора к моторам длина проводов будет значительно превышать длину луча на котором вся эта конструкция будет крепиться.

- Припаиваем коннекторы к концам проводов на регуляторе чтобы в дальнейшем можно было подключить регулятор к моторам.

- Производим монтаж двигателей - привинчиваем по 1 двигателю на каждый луч.


- Осуществляем сборку рамы. Привинчиваем лучи к плате.


- Подключаем провода регуляторов к двигателям. Кабели регулятора и двигателя соединяются в произвольном порядке. В дальнейшем может понадобиться изменение порядка подключения при окончательной конфигурации беспилотника.
При использовании выделенных регуляторов для каждого двигателя, положительный и отрицательный полюс должны соединяться с контроллером, идя лишь от одного регулятора.

- Закрепляем на корпусе модуль управления двухсторонним скотчем. Его лучше всего расположить в центральной части платформы.

- Закрепляем на корпусе приемник двухсторонним скотчем и подключаем его к модулю управления. Приёмник должен быть расположен максимально близко к модулю.

Назначение каналов описано в руководстве к приёмнику. Обычно их последовательность такова:
- Элероны - канал, отвечающий за левые и правые повороты;
- Элеватор - канал, руководящий направлениями вперёд и назад;
- Газ – канал, управляющий газом. Руководит выполнением взлёта и посадки, а также переменами высоты;
- Рысканье - канал даёт возможность производить вращение квадрокоптера вокруг его оси.

- Запитываем устройство. Подключаем к коннектору аккумуляторную батарею.





Эта операция завершает процесс сборки квадрокоптера.

Наладка
- Производим запуск двигателей. Активация двигателей нуждается в выполнении процесса запуска моторов - арминга. Руководство к эксплуатации подробно рассказывает каким образом этого добиться. Деактивация двигателей требует проведения процедуры дизарминга.
- Включаем слабый газ и убеждаемся, что моторы вращаются. Характер вращения должен быть таким же, как указано на схеме в руководстве к контроллеру. При неправильном вращении двигателя нужно просто поменять местами полюса проводов, идущих от двигателя к контроллеру.

- Привинчиваем вторую платформу к корпусу квадрокоптера.

- Подсоединяем к корпусу ленту с липучкой для крепления аккумулятора.

Сборка квадрокоптера на ардуино своими руками
Заключение
Выполнять самостоятельную сборку квадрокоптера могут лишь те, кому по душе решение сложных проблем. Это должны быть люди, испытывающие наслаждение от хода разнообразных расчётов и процесса сборки устройства.
Достоинство коптера, собранного собственными руками в том, что в любой момент можно произвести его апгрейд, добавляя новое оборудование.
Заинтересовали квадрокоптеры. Решил сделать заказ, выбор пал на хабсан х4 c камерой 0.3мр.
Дождался, получил.Достаточно много отлетал на нём(были краши, долгие ожидания запчастей и ремонты). Мой мозг посетила идея собрать большой квадрокоптер, окунулся в эту тему, перечитал много статей. По возможности отвечал на вопросы людей, состоящих в группе Rc моделистов: по поводу выбора деталей, сборки квадрокоптера. Из всего этого возникла идея написать сию статью.
Принцип полёта

Итак, Если вы решили собрать свой квадрокоптер, то вам необходимо определиться с бюджетом. От суммы, которую вы готовы потратить на это Чудо, зависит размер. Наиболее частые размеры(в мм.) это 250,330,450,550 и больше.
*250 размер : маленький, легкий, чаще все используют только для FPV полётов.
*330 и 450 золотая середина для бюджетного квадрокоптера. Приемлемая масса и цена сборки.
*550 и больше можно отнести к профессиональным коптерам или мультироторам. Такие машины получатся тяжелыми и дорогостоящими. Для данных ЛА будут мощные двигатели и они могут таскать приличный вес, вплоть до килограммовых зеркалок.
Своё повествование я продолжу опираясь на коптер 450 масштаба.
Особое место в данной категории занимают рамы DJI 330 и 450, TBS Discovery.

Цена их соответствующая…высокая.
Есть множество клонов, его я и выбрал.

Настало время выяснить,что же такое
квадрокоптер и из чего он состоит.
1. Рама
2. Приёмник/Передатчик
3. Контроллер полёта:
a) AIOP
b) NAZA
c) MuliWii
d) HKPilot
е) AMP
f) И другие
4. Силовая установка
a) Мотор
b) Регулятор скорости
c) Пропеллеры
5. Аккумулятор
6. Доп. Оборудование:
a) FPV система (вид от первого лица в реальном времени)
Курсовая камера
Передатчик
OSD
b) Подвес для бортовой камеры
c) Подсветка
Теперь можно все детально рассмотреть.
1) С рамой
уже определились. 450 масштаб, клон TBS.
2) Приёмник/Передатчик.
Выбор его имеет очень важное значение. Вам нужно для себя понять: как далеко вы хотите летать.
Самые популярные варианты:
1,5-2км обеспечит 2,4Ггц
433 мгц обеспечит около 5-10км(все зависит от мощности, можно улететь и на 20км)
Для себя выбрал 2,4Ггц FlySky Th9x 9каналов
Не дорогая и простая в настройке аппаратура.
Для квадрокоптера необходимо от 5 каналов.
Выбор данной аппаратуры обусловлен её популярностью, давностью на рынке.Существует множество клонов.Ведётся много споров по поводу того, какая фирма была первой, это та же тургига 9, авионикс и другие… В интернете множество настроек.
3) Контроллер полёта
На данный момент очень много контроллеров полёта для квадрокоптеров. Свой выбор я сделал. Это Naza Lite c GPS
Не очень дорого и сердито. Наза требует минимальной настройки и сделать это очень просто.
С контроллерами AIOP, Crius и MultiWii будет много раз сложнее и особенно новичку.
Почему я взял контроллер с GPS?
Данная функция необходима для зависания в точке и возврата домой.
Я вижу это очень удобным функционалом.
4) Силовая установка
Вызывает множество вопросов у непосвященных.
Используются БК моторы. Они являются трёх фазными(3 провода), их КПД около 90%.
Для управления скоростью вращения таким мотором используется регулятор оборотов(регуль), который получает команды от контроллера полёта.
Рассмотрим рамы 330,450мм. В зависимости от ваших потребностей необходимо прикинуть вес квадрокоптера. В среднем получается от 1к до 1,5кг. Желательно чтобы тяга моторов была в 2-2,5 раза больше общей массы. Это говорит о том, что тяга должна быть 2-3 кг. Делим это на 4 и получаем тягу одного мотора: примерно 500-750 гр.
Возникает вопрос: какой двигатель выбрать? Смотрим в характеристики рамы: нас интересует какие двигатели можно в неё поставить. Должны интересовать первые 2 цифры: 22 или 28 в большинстве случаев.
Начинаем выбор двигателя. У названия двигателя вы увидите некую величину, например: 1100kv. Это величина обозначает количество оборотов на 1 вольт. Двигатели с высокими значениями kv имеют меньше витков обмотки статора, чем менее оборотистые.Из этого вытекает, что максимальная сила тока будет выше в двигателях с меньшим kv, которые имеют большую силу крутящего момента и это позволяет использовать большие пропеллеры.
Можно сравнить с коробкой передач автомобиля. 380kv и 1400kv это как первая и третья передача у авто.
380kv для размеренных медленных и долгих полётов с большой грузоподъемностью
1400kv для быстрого и маневренного хода.
В просторах интернета или же в описании этого двигателя можно увидеть его технические характеристики и результаты тестов. Нужно узнать максимальную силу тока (А) которую сможет потянуть двигатель и исходя их этих данных подобрать регулятор оборотов(ESC). Допустим max А для двигателя 20А. Тогда, ESC берём на 20-25% мощнее, 25-30А.
Теперь смотрим результаты тестов.
Например
видим: 11х4.7 –3S-12А – 830гр
Это означает
11х4.7 - характеристики пропеллера(11-дюймы, 4.7 шаг)
3S - число банок LiPo батареи
12А - сила тока в цепи при данной нагрузке
830гр – тяга двигателя при даных условиях
Таким образом, максимальная тяга 830х4=3300 гр., max сила тока в цепи 12х4=48А
Максимальная сила тока нужна для подбора Аккума и Проводки.
Для начала не берите карбоновые пропы. Переплата. Учитесь летать на дешевых.
Крепление пропеллера зависит от самого двигателя. Большинство пропеллеров имеют адаптер под ось двигателя. Возможно крепление на Цангах или же резьбой. Есть прекрасные варианты самозатягивающиеся-крепления у DJI, при таком варианте ваш пропеллер никогда не открутится во время полёта.
Для более простых вариантов советую дополнительно закрепить герметиком для резьбы.
Обращаю внимание
: сравнивать моторы с разным kv можно при условиях одного типоразмера. Например, EMAX XA 2212 существуют в разных конфигурациях:
820
980
1400
Их можно сравнить.
Эффективность мотора с 1400kv будет максимальной при использовании пропеллера 8040,
А мотора с 820kv - при пропеллере 1147.
Максимум крутящего момента будет у мотора с 820kv, поэтому целесообразно использовать большие пропеллеры. А мотор с 1400kv будет любить высокие обороты при меньшей нагрузке.
Разница между представленными моторами в обмотке.
Разумно их использовать так:
1400kv на раме 330 и пропеллерами 8040
980kv на раме 450 и пропеллерами 1045
820kv на раме 500-550 и пропеллерами 1147
Я выбрал
И пропеллеры
Замечательный набор.
Схема подключения
Для простоты: Сигнальный- черный, Силовой(+\-) - красный
5) Аккумулятор
Выбирая аккум необходимо подобрать токоотдачу. Это число С.(25С,35С)
Не забываем что, по нашим данным система кушает 48А.
Допустим что, есть аккум 3300mAh 3S 35C Lipo Pack
3300 mAh - ёмкость аккума
3S – число банок(одна банка 3,7v)
35C – токоотдача. Т.е. Аккум ёмкостью 3.3Ah(3300 mAh) х 35C = 115А
Что достаточно покрывает наше энергопотребление. Даже излишне. Чем больше С, тем тяжелее и дороже аккум.
Посмотрим сможет ли аккум такой же ёмкости, но с токоотдачей 25С справится с нашими задачами или нет: 3.3Ah(3300 mAh) х 25C = 82А
Ответ:да.
Такой аккум будет легче и дешевле.
Для контроля состояния батареи можно купить такую штуку.
Для зарядки аккумов очень популярна Imax B6, будьте осторожны, очень много подделок.
И не забывайте с LiPo надо очень осторожно обращаться.
Мой совет: берите не меньше пары аккумов.
6) Доп. Оборудование.
Когда вы определились с дальностью полёт и выбрали систему управления, можно начинать выбор FPV системы:
FPV- дословно: вид от первого лица в реальном времени.
2,4Ггц совместима с 5,8Ггц
433Мгц совместима с 1,2 Ггц
Иначе будут создаваться совместные помехи.
Для своей 2.4Ггц я подобрал 5,8Ггц 200mw
FPV-система стостоит из:
1) Курсовой камеры
2) Передатчика на квадрике
3) Приёмной станции на земле.
Для Увеличения дальности связи можно заменить стандартные антены на ""клеверы""
Большая часть передатчиков питается в пределах 9-12v, небольшая 3S батарея сможет запитать передатчик и камеру, которая выбирается для данного вольтажа.
Что значит 200mw?
Это мощность передатчика. Она непосредственно влияет на дальность связи. На открытой местности с нештатными антенами сигнал можно получать на расстоянии до 1 км.
С учетом того, что моя система управления на расстояние больше 1,5-2км не способна, это идеальный
вариант для моих потребностей.
С выбором приёмника и передатчика теперь все понятно, а как выбрать камеру, их огромное колличество?
Выбор камеры первоначально упирается в денежные средства.
Есть камеры которые имеют функцию потоковой передачи данных и одновременной записи.Стоимость таких камер значительно выше. Очень популярной является камера мобиус.
Появился её конкурент, тоже имеющий AV выход
Можно использовать курсовую камеру из самых дешовых, без корпуса. Стоимость которой колеблется от 600 до 1000рублей, а записывать с помощью хорошей экшен камеры на подвесе.
У FPV камеры мы увидим число ТВЛ. Что это такое? Это число строк развертки. Для FPV камеры будет достаточно 500-700ТВЛ. Важное значение имеет уровень минимальной освещенности, данный параметр измеряется в люксах. 0.01 люкс достаточно для полётов даже вечером. Угол обзора имеет не менее важное значение. 100-120 градусов это идеально. Не плохо бы иметь автоматическую коррекцию засветов и авто. баланс белого.
Картинку можно вывести на такой монитор
Можно прикупить 2х- или 3х-осевой подвес для камеры. Такая штука позволяет поворачивать камеру и иметь более стабильную картинку, без рывков и дерганий.
Штука достаточно дорогая.
У меня вот такой:
Естественно сама бортовая камера
Можно установить LED подсветку, пищалку,GPS-трэкер
Как вы поняли, что бы собрать такой БПЛА необходимо не мало вложений.
Цена приблизительно в пределах 400-500 долларов.
Этот обзор предназначен для новичков и несет в себе теорию, в скором времени будет продолжение.Со сборкой и настройкой.
Я запланировал цикл статей и буду не спеша их реализовывать.
Буду рад критике,спасибо
за просмотр.
Вскрою карты: конечный результат
Как такую штуку собрать и поднять в небо?
Инструкция будет в следующей части)
Вот небольшой ролик из первых полётов с подвесом.
P.S Покупалось все на личные средства. Планирую купить +99 Добавить в избранное Обзор понравился +62 +150
Беспилотные летательные аппараты (дроны) – это высокотехнологичная дорогостоящая техника. Однако вполне доступными видятся «беспилотники» любительского уровня исполнения. Не случайно последние годы быстро набирают популярность среди обывателей небольшие дроны, в том числе собранные своими руками. Новая, так называемая технология FPV (First Person View) – вид от первого лица, даёт уникальный опыт полёта каждому желающему. Радиоуправляемый авиамоделизм всегда имел спрос молодёжного социума. Появление дронов лишь подстегнуло этот спрос, легко удовлетворяемый, если купить готовую летающую машину, либо собрать дрон собственными руками.
Квадрокоптер (дрон) — конструктивное исполнение беспилотного летательного аппарата, принадлежащего к числу наиболее популярных проектов авиамоделизма.
Самый простой способ обзавестись БПЛА – просто взять и купить квадрокоптер (дрон) , благо рынок (включая сеть Интернет) свободно предоставляет такую возможность.
Однако для большего интереса и с целью лучшего понимания – что такое дрон, практичнее и экономичнее собрать квадрокоптер своими руками (DIY – Do It Yourself), к примеру, из набора готовых деталей. Более серьёзный вариант – сборка квадрокоптера (дрона) с нуля – используя минимум готовых компонентов.
Что потребуется для сборки квадрокоптера (дрона)
Прежде чем начинать сборку беспилотника собственноручно, потребуется определиться с компонентами для создания квадрокоптера (дрона). Поэтому рассмотрим список базовых компонентов, составляющих (дрона):
Рама квадрокоптера
Раму дрона (квадрокоптера) допускается строить, используя разные материалы:
- металлические,
- пластиковые,
- деревянные.
Если выбор пал на деревянную раму дрона (как самую простую с точки зрения технологии), понадобится деревянная доска толщиной около 2,5-3,0 см., длиной 60-70 см.
Доска разрезается таким образом, чтобы получились две планки длиной 60 см и шириной 3 см. Эти две планки — структура будущего квадранта квадрокоптера.
Структура рамы дрона выстраивается простым пересечением двух деревянных планок под фрейм-фактор «X». Полученную раму усиливают прямоугольной деталью – сшивкой, в центральной части. Размер прямоугольника составляет 6 × 15 см, толщина 2 мм. Материал тоже дерево.
 Классическая конфигурация рамы квадрокоптера (дрона), которая применяется в большинстве случаев сборки своими руками. Показан вариант с установленными двигателями и контроллером
Классическая конфигурация рамы квадрокоптера (дрона), которая применяется в большинстве случаев сборки своими руками. Показан вариант с установленными двигателями и контроллером
Не исключаются другие размеры рамы квадрокоптера (дрона), отличные от заявленных, но не следует забывать о соблюдении пропорций. Соединение частей рамы обычно выполняется гвоздями и клеем.
Вместо дерева допускается применить металл или пластик тех же размеров. Однако способы соединения планок будут уже иными.
Ниже список готовых карбоновых рам квадрокоптеров (дронов), имеющихся в продаже на рынке:
- LHI 220-RX FPV
- Readytosky FPV
- iFlight XL5
- RipaFire F450 4-Axis
- Usmile X style
- Readytosky S500
Двигатели, модули ESC, пропеллеры
Под изготовление классического квадрокоптера (дрона) необходимо иметь 4 двигателя. Соответственно, если задуман проект октокоптера, потребуется уже восемь двигателей.
 Один из вариантов изготовления пропеллеров моторов квадрокоптера (дрона). Материалом выбран жёсткий пластик, учитывая малые габариты конструкции
Один из вариантов изготовления пропеллеров моторов квадрокоптера (дрона). Материалом выбран жёсткий пластик, учитывая малые габариты конструкции
На русском языке модуль ESC (Electronic Speed Controllers) квадрокоптера называют – контроллер скорости. Это не менее важная часть беспилотного летательного аппарата, чем электромотор.
Модули ESC отвечают за корректную передачу мощности моторам дрона. Количество модулей квадрокоптера соответствует числу электромоторов.
- Emax RS2205 2600KV Brushless Motors
- DLFPV DL2205 2300KV Brushless Motors
- Gemfan GT2205 2650KV Brushless Motors
- HOBBYMATE Quadcopter Motors Combo
- 35A ESC BlHeli32 32bit DSHOT1200
- Thriverline Sunrise ESC 20A BLHeli-S
Пропеллеры можно купить металлические 9-дюймовые. Эти изделия по доступной цене свободно приобретаются на рынке.
Металлические конструкции прочны, не поддаются изгибу при высоких нагрузках в процессе полёта. Однако для более высокой производительности винтов – лучший вариант карбоновые пропеллеры. Например, эти:
- BTG Quick Release Carbon Fiber Reinforced Propellers
- Performance 1245 Black Propellers MR Series
- YooTek 4 Pairs Foldable Quick Release Propellers
- Myshine 9450 Self-tightening Propeller Props
- Jrelecs 2 Pairs Carbon Fiber Propellers
Электроника и модуль питания
Набор электроники дронов (квадрокоптеров) традиционно состоит из контроллера полёта и беспроводной системы управления. Сюда же можно отнести и модуль питания, так как большинство питающих модулей наделяются электронной системой мониторинга АКБ.
Состояние заряда аккумулятора – важный момент полёта. Трудно представить, что станется с аппаратом, если АКБ разрядится, к примеру, во время полёта над водоёмом.
Контроллер полёта поддерживает стабильность полёта квадрокоптера, путём обработки данных относительно направления и силы ветра, а также многих других параметров.
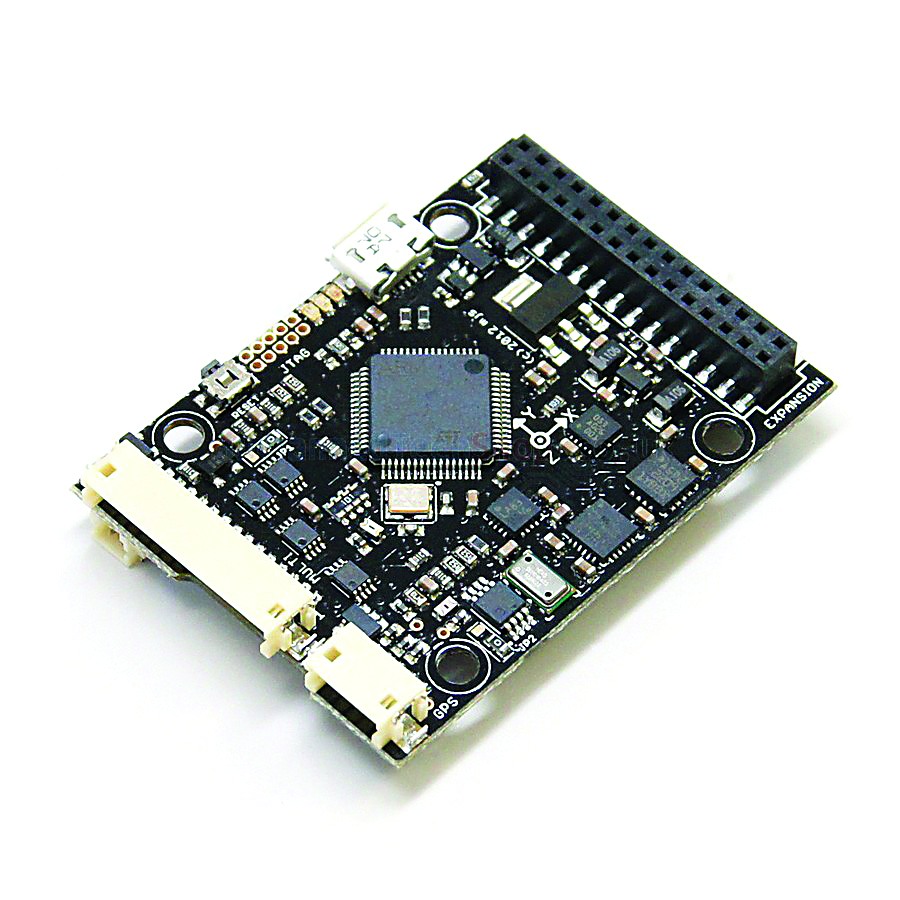
 Контроллер полёта на чипе STM32F103C8T6: 1, 2 — пищалка (+; -); 3 — поток; 4 — RCCI; 5 — корпус; 6 — 5 вольт; 7 — батарея; 8, 9 — UART TX, RX; 10 — индикатор полосы; 11, 12, 13, 14 — моторы; 15 — PPM
Контроллер полёта на чипе STM32F103C8T6: 1, 2 — пищалка (+; -); 3 — поток; 4 — RCCI; 5 — корпус; 6 — 5 вольт; 7 — батарея; 8, 9 — UART TX, RX; 10 — индикатор полосы; 11, 12, 13, 14 — моторы; 15 — PPM
Контроллер, как правило, оснащается так называемой «прошивкой» — микросхемой памяти, куда записываются базовые сведения для чипа, подобного микроконтроллеру фирмы AVR.
Контроллер полёта можно купить в готовом варианте, но не исключается также сборка схемы своими руками. Правда, для второго варианта необходимо иметь навыки электронщика и соответствующие . Поэтому проще всё-таки воспользоваться готовыми решениями.
Готовые решения контроллеров дронов
Примеры готовых моделей контроллеров под управление дронами:
ArduPilot – качественный контроллер (дорогостоящий), предназначенный для летательных аппаратов беспилотного управления. Прошивка отличается наличием полностью автоматизированных режимов полёта. Система обеспечивает высокие технические характеристики.
OpenPilot CC3D – система на базе Digital Motion Processor, наделённая целым семейством датчиков организации полёта. Включает в состав трёхкоординатный акселерометр и гироскоп. Проект достаточно легко настраивается и устанавливается. Имеется руководство пользователя.
NAZE32 – тоже достаточно гибкая и мощная система, но видится несколько усложнённой в плане настройки. Оснащается продвинутой программой прошивки.
KK2 – одно из популярных решений, которое часто выбирают начинающие, так как контроллер относительно недорогой и оснащается ЖК-дисплеем. Основой схемы является микроконтроллер AVR одной из последних модификаций. Схемой предусматривается подключение датчиков MPU6050. Однако настройка только ручная.
Беспроводная система дистанционного управления состоит из передатчика и приёмника радиосигналов. Посредством системы ДУ осуществляется не только управление полётом, но также управление положением , установленной на дроне.
 Пульт управления дроном (квадрокоптером) в классической вариации передатчика радиосигнала с возможностью мониторинга через ЖК-дисплей
Пульт управления дроном (квадрокоптером) в классической вариации передатчика радиосигнала с возможностью мониторинга через ЖК-дисплей
Здесь, как правило, используются исключительно готовые решения. Например, любая из систем ДУ в списке ниже:
- Futaba 10JH 10-Channel Heli T-FHSS Computer Radio System
- Turnigy 9xr PRO Radio Control System
- Spektrum DX8 Radio Transmitter
- YKS FlySky FS-i6 2.4GHz 6 Channels Radio Control System
Сборка дрона (квадрокоптера) своими руками
На созданной раме устанавливаются электродвигатели. Возможно, придётся рассчитать местоположения моторов и просверлить в раме отверстия под крепление, если нет иных вариантов.
 Примерно по такой механической схеме рекомендуется закреплять электромоторы на раме квадрокоптера (дрона). Правда, многое в креплении зависит от материала рамы
Примерно по такой механической схеме рекомендуется закреплять электромоторы на раме квадрокоптера (дрона). Правда, многое в креплении зависит от материала рамы
Затем монтируются контроллеры скорости. Традиционно эти модули устанавливаются на нижней плоскости рамы. Контроллеры скорости через ленточные кабели соединяются непосредственно с двигателями.
Далее на раму добавляется посадочный модуль – часть конструкции, предназначенная для организации «мягкой» посадки дрона. Исполнение этого конструктивного элемента должно предусматривать смягчение ударов при посадке на твёрдую почву. Конструкции возможны разного плана.
На следующем шаге монтируется контроллер полёта. Месторасположение этого модуля не критично. Главное, чтобы обеспечивалась защита электроники и бесперебойная работа.
Полёта дрона соединяется по прилагаемой схеме к модулю (приёмнику) дистанционного пульта управления и к электронной плате регулировки скорости моторов. Все соединения делаются посредством надёжных разъёмов, а наиболее важные точки «садятся» на оловянную пайку.
В принципе, основная сборка на этом завершается. Но спешить закрывать дрон корпусом не стоит. Необходимо протестировать все системы – датчики и другие компоненты квадрокоптера, используя для этого специальный софт OpenPilot GCS (CC3D и GCS). Правда, релиз программы довольно старый и новыми разработками может не поддерживаться.
После теста собранный аппарат – беспилотный квадрокоптер готов к полёту. В дальнейшем дрон несложно модернизировать — оснастить видеокамерой и прочими устройствами, расширяющими функциональность.
Сегодня заказать электронику для квадрокоптера из китая стоит очень дешево. Собрать раму квадрокоптера своими руками из подручных материалов и вовсе не сложно. Научиться управлять можно с помощью авиасимуляторов. Так что главное – это наличие желания сделать квадрокоптер своими руками.
Электронику для квадрокоптера лучше всего купить готовую.
Сборка радиоуправляемого квадрокоптера своими руками
Для начала надо определиться – будете использовать стандартную раму или решите изготовить свою.
Покупная рама удобна, но в случае поломки придется ждать, пока приедет запасная деталь. Самодельная рама квадрокоптера собранная своими руками позволяет починить поломку за 20-30 минут, но требует дополнительной работы при изготовлении квадрокоптера.
Наиболее простым вариантом является использование пластиковых труб для проводки проводов. Они легкие и достаточно прочные. К тому же можно купить и поворотные части и крепления к стене, которые подходят для крепления электродвигателей к раме.
В результате получается очень прочная конструкция которая позволяет возить не только электронику самого квадрокоптера, но и камеру для видеосъемки с квадрокоптера.

Немаловажная деталь для начинающих — место, где вы будете выпускать для полётов свой первый дрон. Городская местность отпадает сразу, так как дома, деревья и провода будут мешать пробным полётам. Парк так же не подходит. Одно неправильное движение — пострадать может отдыхающий и ваше новоиспечённое детище. Лучше выйти в чистое поле и рулить квадриком в своё удовольствие.
Список основных запчастей:
O моторы с контроллерами для них;
O аккумулятор для квадрокоптера и пульта управления;
O полётный контроллер;
O пульт управления с приёмом и передачей сигнала;
O зарядное устройство;
O соединительные провода, болтики и прочее;
O инструменты для работы.

Для того, чтобы в будущем осталась возможность модифицировать беспилотник для работы с видео- и фотосъёмкой, следует основание между лучами коптера сделать пошире, чтобы потом вместить остальные девайсы.
Выбор формы квадрокоптера
В первую очередь следует определиться с количеством лучей и винтов на коптере. Есть большое разнообразие в модификациях и внешних видах летающих дронов, исходя из количества лучей, выходящих из центра рамы, бывают три-, квадро-, гекса- и октокоптеры.
Количество пропеллеров может быть больше, чем лучей. Но название не меняется. Например, у квадрокоптера на каждом луче по два двигателя с пропеллерами — это не делает его октокоптером.
Наиболее популярной моделью среди коптероводов остаётся quatrocopter с расположением лучей в форме Х. Во-первых, сразу два мотора тянут вперёд всю конструкцию, а во-вторых, прицепленная видеокамера не будет видеть перед собой винты.

Что стоит учесть при подборе всех запчастей
Исходя из предполагаемого веса полной конструкции уже FPV квадрокоптера с камерой, следует собрать коптер с мощными моторами. Отсюда вытекает приобретение дополнительных аккумуляторов или установка сразу более ёмких.
Наглядное видео сборки:
Видео YouTube
Для облегчения конструкции раму можно сделать самостоятельно. Варианты есть: начиная от простых деревянных линеек, заканчивая алюминиевым профилем или трубками. На этом можно сэкономить. Главное, чтобы материал был прочный, так как при падении первое, что страдает — лучи коптера.
Конечно, есть уже готовые рамы, но следует остерегаться подделок, иначе после первого же краш-теста отлетит минимум одна «нога». На время навыка управления выигрышнее подручные материалы.

Лучи для квадрокоптера имеют оптимальный параметр — 30-60 см в длину от мотора до мотора.
Чтобы не пораниться и не косить листву ближайших деревьев, а так же для тестирования коптера в домашних условиях, на пропеллеры можно поставить специальную защиту.
К чему будет крепиться контроллер полёта и все остальные примочки? Здесь тоже можно включить фантазию. Конечно, картонка не подойдёт, но квадрат фанеры, пластиковое основание из-под бокса для CD-дисков — оптимально. Не тяжёлое и выдержит всё то, что требуется нацепить.
Моторы — их нужно сразу четыре. Для пропеллеров в основном подбираются по диаметру и мощности. Диаметр берётся от параметров рамы (если та самодельная, то на своё усмотрение).
Контроллеры управления двигателями нужны для регулировки скорости вращения лопастями. Мощность двигателей напрямую зависит от веса дрона в сборе.
Аккумуляторы для моторов могут быть разными по ёмкости. Лучше предоставить возможность менять аккомы на большие мощности и, конечно же, использовать не один, а сразу несколько.

Сами винты можно взять 9-12 см. Пара обыкновенных и 2 с обратным вращением. Желательно, чтобы к ним в комплекте шли крепежи сразу на несколько видов моторов.
Самое главное и самое затратное в quatrocopter — это его «мозги», а именно контроллер полёта — на нём нельзя экономить. Здесь следует учитывать будущие возможности беспилотника. Микроконтроллер лучше брать программируемый (например, Arduino Mega). Датчики к нему можно взять «всё в одном» All In One (гироскоп, акселерометр, барометр, магнитометр), или по минимуму — гироскоп и акселерометр.
Дополнительные функции:
· GPS — программирование маршрута полёта;
· «мягкая посадка» — fail safe (если радиосвязь с пультом потеряется, то коптер плавно сядет, а не рухнет на землю);
· FPV (first person view) — вид от первого лица, а наблюдение из планшета.
Передатчик на управляющую плату стоит подбирать по карману. Главное, чтобы было не менее четырёх каналов и частота 2,4 ГГц. Его можно купить для левши или правши.
С проводами, конечно, придётся повозиться, но в умелых руках это время пройдёт быстро.
На ножки коптера или на сами лучи на раме лучше прикрепить специальную мягкую подкладку, чтобы на твёрдых поверхностях посадка была легче.
Легко не будет, но будет интересно и занимательно!
Помимо основных материалов требуются еще и расходные – болты, гайки, шайбы.
На этом этапе из инструментов понадобятся ножовка по металлу, дрель и напильник.
После того, как все материалы подготовлены, приступаем к процессу:
· Любым удобным способом перенесите чертеж на заготовку текстолита и обрежьте ненужный материал по контуру.
· Соедините все получившиеся детали, закрепив их.
· Подготовьте отверстия под винты (на чертеже они красного цвета) сверлом диаметром в 3 миллиметра.
· После того, как лучи закреплены на раме, проделайте отверстия для облегчения конструкции (на чертеже это круги белого цвета).
· На лучах подготовьте отверстия для крепления двигателя.
· На последнем этапе обезжирьте раму и обклейте её двусторонним скотчем для гашения вибраций.

На последующих этапах понадобятся такие элементы: плата, контроллеры двигателей, пропеллеры, двигатели, аккумулятор и зарядное устройство для него, передатчик и приемник.
Для того, чтобы закрепить контроллеры на плате-адаптере, стоит использовать медный провод без изоляции. После этого производится припаивание проводов питания, провода шины, тумблер для включения и выключения питания.
При размещении контроллеров на плате стоит помнить, что все они должны быть направлены к соответствующим двигателям.
Следующий этап – установка двигателей. Начинается он с припаивания проводов к выводам двигателей их изоляции. Затем устанавливаются сами двигатели на концах лучей и закрепляются болтами с нижней стороны «ноги».
После этого наступает ответственный момент крепежа «мозга» квадрокоптера – платы-адаптера. Лучше устанавливать её на небольшие резиновые демпферы. Важно защитить плату от влаги и пыли, так что тут же закрываем её любым пластиковым колпаком. Его форма и прозрачность зависит исключительно от ваших предпочтений и на сохранность платы никак не влияет.

В подготовленный отсек крепится аккумулятор, который также лучше закреплять на резиновой прослойке.
На последнем этапе закрепляем винты на двигателях, подключаем передатчик и светодиодную подсветку.
От общего — к частному. Рама квадра должна быть прочной. Для ее изготовления подойдет кусок фанеры (150 х 150 мм), в качестве каркаса можно использовать квадратный профиль из алюминия (14 х 14 мм).
Профиля понадобятся и для изготовления лучей. Длина каждого из них от центра конструкции должна составлять 300 мм. На них, кстати, можно приспособить куски пенопласта или резины, которые будут смягчать приземление.
Далее установка платы. Ее нужно купить. Рекомендуется приобретать плату, уже оснащенную всеми датчиками — гироскопом, акселерометром, барометром и магнитометром — AllInOne. Есть варианты плат также и GPS-приемником. Датчики можно крепить к конструкции на толстый скотч или силикон — это поможет избежать сильной вибрации.
Монтировать ее надо в центре конструкции. Саморезы должны надежно прикрутить плату к концам лучей и проходить через фанеру. Рядом с ней должен находиться приемник. Его можно приклеить суперклеем.

Двигатели квадрокоптера должны располагаться на одинаковом расстоянии. Поэтому перед их расстановкой нужно сделать точную разметку на лучах и уже потом сверлить отверстия. Кстати, пространство для хвоста вала нужно делать насквозь, на всю его ширину так, чтобы он не задевал его края.
Теперь немного о проводах питания регуляторов скорости. Они соединяются параллельно с помощью переходников. Там, где к ним подключается батарея, следует делать разъемное соединение.
Теперь остается только подключить провода к соответствующим двигателям и установить “мозги”. Найти прошивку для платы (Arduino) в интернете не составляет труда. Сначала закачивается она, потом настройки. Во время установки программы будут появляться пошаговые инструкции. Им нужно четко следовать, чтобы отладить управление аппаратом и откалибровать его.
В меню программы есть раздел AC2 Sensor. Здесь проверяется работа датчиков и приемников. Все повороты и изменения уровней должны с максимальной точностью отражаться на колебаниях стрелки и светодиодных показателях.

После всей этой отладки можно устанавливать пропеллеры и тестировать полет. Аппарат при этом лучше разместить подальше от себя. Газовать следует плавно. Если дрон поднялся в воздух — великолепно. Если его начало трясти, следует перейти к настройкам PID. Возможны и другие нюансы отладки через программу.
Как разумно подобрать двигатель для квадрокоптера? Несомненно, данную деталь стоит подбирать исходя из характеристик и возможностей летающего аппарата. Использование мотора необходимо только в больших квадрокоптерах, иначе его наличие будет неоправданно и аппарат попросту не будет работать.
Главным правилом является то, что выбирать мотор стоит уже после окончательной сборки квадрокоптера. При планировании присоединять к летающему устройству видеокамеру или иное устройство, стоит учитывать дополнительный вес. Чтобы не перегружать аппарат, необходимо рассчитать тягу, которую можно посмотреть по специальным таблицам. К примеру, если вес аппарата равен 1,5 килограмма, то тяга должна быть в 2 раза больше, то есть быть равной 3 килограммам.
Чтобы правильно подобрать двигатель квадрокоптера, стоит тщательно изучить все его характерные свойства. Не менее важную роль играют винты аппарата. Квадрокоптер висит в воздухе за счет нескольких пар несущих винтов, вращающихся в различных направлениях.
Как раз для того, чтобы винты нормально работали, требуется подобрать двигатель на основе параметров своего квадрокоптера. Винты потребляют большую энергию двигателя, и мощность мотора важна при покупке.
Для подбора правильного мотора рекомендуем ознакомиться с различными видеозаписями, где вам подробно расскажут о хороших деталях для квадрокоптера. За счет советов, которые будут давать уже опытные пилоты, можно собрать уникальный квадрокоптер с мощным двигателем.
Зачем нужен мощный двигатель? Во-первых, он позволяет летать аппарату намного быстрее и дольше, совершать определенные маневры. Во-вторых, на квадрокоптер можно повесить дополнительный груз, к примеру, камеру, которая будет снимать материалы при полете на высоте. За счет этого можно сделать качественные снимки.
Следовательно, подбирать двигатель необходимо основываясь на том, какой квадрокоптер вы желаете собрать. Следует подбирать правильную мощность двигателя, иначе аппарат может либо не взлететь, либо вовсе будет неуправляемым. Чтобы избежать этого, необходимо прислушиваться к советам специалистов, и тогда собрать квадрокоптер будет очень просто.
Несмотря на то что квадрокоптеры крайне модная тема, выбирать компоненты для сборки своего аппарата по-прежнему не так просто. Выбор деталей для конкретного проекта - это мучительный поиск оптимального сочетания веса, мощности и функ-циональности. Поэтому прежде, чем окунуться в мир бесчисленных интернет-магазинов и безымянных китайских производителей, давай проделаем подготовительную работу.
Что такое квадрокоптер и для чего это надо
Мультироторы, они же мультикоптеры или просто коптеры, - это беспилотные летательные аппараты, предназначенные для развлечения, съемки фото и видео с воздуха или отработки автоматизированных систем.
Коптеры обычно различают по числу используемых моторов - начиная от бикоптера с двумя моторами (как GunShip из фильма «Аватар») и заканчивая октакоптером с восемью. На самом деле число моторов ограничено только твоей фантазией, бюджетом и возможностями полетного контроллера. Классическим вариантом является квадрокоптер с четырьмя моторами, расположенными на перекрещивающихся лучах. Такую конфигурацию еще в 1920 году попытался соорудить француз Этьен Омишен (Étienne Oehmichen), и в 1922 году у него это даже получилось. По сути, это самый простой и дешевый вариант сделать летательный аппарат, способный без особых проблем поднимать в воздух небольшие камеры вроде GoPro. Но если ты собираешься взлетать с серьезной фото- и видеотехникой, то стоит выбирать коптер с большим числом моторов - это не только увеличит грузоподъемность, но и добавит надежности, если в полете выйдет из строя один или несколько моторов.
Теория полета
В теории полета (аэродинамике) принято выделять три угла (или три оси вращения), которые задают ориентацию и направление вектора движения летательного аппарата. Проще говоря, летательный аппарат куда-то «смотрит» и куда-то двигается. Причем двигаться он может не туда, куда «смотрит». Даже самолеты в полете имеют какую-то составляющую «сноса», которая уводит их от курсового направления. А вертолеты вообще могут летать боком.
Три эти угла принято называть крен, тангаж и рыскание. Крен - это поворот аппарата вокруг его продольной оси (оси, которая проходит от носа до хвоста). Тангаж - это поворот вокруг его поперечной оси (клюет носом, задирает хвост). Рыскание - поворот вокруг вертикальной оси, больше всего похожий на поворот в «наземном» понимании.
Основные маневры (слева направо): движение по прямой, крен/тангаж и рыскание
В классической схеме вертолета основной винт при помощи автомата перекоса лопастей управляет креном и тангажем. Так как основной винт обладает ненулевым сопротивлением воздуха, у вертолета возникает вращающий момент, направленный в сторону, противоположную вращению винта, и, чтобы его скомпенсировать, у вертолета есть хвостовой винт. Изменяя производительность хвостового винта (оборотами или шагом), классический вертолет управляет своим рысканием. В нашем же случае все сложнее. У нас есть четыре винта, два из них вращаются по часовой стрелке, два - против часовой. В большинстве конфигураций используются винты с неизменяемым шагом и управлять можно только их оборотами. Если они все будут вращаться с одинаковой скоростью, то они скомпенсируют друг друга: рыскание, крен и тангаж будут нулевыми.

Если мы увеличим обороты одного винта, вращающегося по часовой стрелке, и уменьшим обороты другого винта, вращающегося по часовой стрелке, то мы сохраним общий момент вращения и рыскание по-прежнему будет нулевым, но крен или тангаж (в зависимости от того, где мы сделаем ему «нос») изменятся. А если мы увеличим обороты на обоих винтах, вращающихся по часовой стрелке, а на винтах, вращающихся против часовой стрелки, уменьшим (чтобы сохранить общую подъемную силу), то возникнет вращающий момент, который изменит угол рыскания. Понятное дело, что все это будем делать не мы сами, а бортовой компьютер, который будет принимать сигнал с ручек управления, добавлять поправки с акселерометра и гироскопа и крутить винтами, как ему надо. Для того чтобы спроектировать коптер, необходимо найти баланс между весом, временем полета, мощностью двигателей и другими характеристиками. Все это зависит от конкретных задач. Все хотят, чтобы коптер летал выше, быстрее и дольше, но в среднем время полета составляет от 10 до 20 минут в зависимости от емкости аккумулятора и общего полетного веса. Стоит запомнить, что все характеристики связаны между собой и, к примеру, увеличение емкости аккумулятора приведет к увеличению веса и, как следствие, к уменьшению времени полета. Чтобы узнать, сколько примерно твоя конструкция будет висеть в воздухе и сможет ли вообще оторваться от земли, существует хороший онлайн-калькулятор ecalc.ch . Но прежде чем вбивать в него данные, нужно сформулировать требования к будущему аппарату. Будешь ли ты устанавливать на аппарат камеру или другую технику? Насколько быстрым должен быть аппарат? Как далеко тебе нужно летать? Давай посмотрим на характеристики различных компонентов.
 PX4 - бортовой компьютер с полноценной UNIX-системой
PX4 - бортовой компьютер с полноценной UNIX-системой
Рама
Основной момент, который нужно решить при выборе рамы, - будешь ли ты использовать готовую раму или же делать ее сам. С готовой рамой все проще, да и заказывать в любом случае придется множество деталей. При этом, учитывая цены в китайских магазинах, самодельный вариант может оказаться дороже. С другой стороны, собственную раму в случае аварии будет проще починить. Ну и, естественно, своими руками можно сделать любую, даже самую сумасшедшую конструкцию. Рассмотрим поподробнее самосборный вариант.
Сделать раму можно из любых подручных материалов (дерево, алюминий, пластик и так далее). Можно подойти чуть серьезнее и выпилить ее на ЧПУ-станке из плетеного карбона, причем можно усложнить задачу и сделать складную конструкцию.
Самый простой вариант для любителей DIY - пойти в OBI, «Леруа Мерлен» или на строительный рынок и купить квадратную алюминиевую трубу 12 × 12, а также алюминиевый лист толщиной в 1,5 мм. Для того чтобы сделать раму из таких материалов типа «четыре палки и крепеж», достаточно дрели или ножовки по металлу. Но нужно быть готовым к тому, что такая конструкция прослужит недолго. Все-таки все эти профили делают из очень мягкого материала (АД31/АД33), при полетах он будет легко гнуться.
 Oehmichen № 2, пилотируемый квадрокоптер французского инженере Этьена Омишена, запущенный в 1922 году
Oehmichen № 2, пилотируемый квадрокоптер французского инженере Этьена Омишена, запущенный в 1922 году
В качестве образца для твоей рамы можно взять упрощенную заводскую раму или же найти в интернете готовый чертеж. Более сложные материалы (например, углепластик) можно заменить на алюминий - если и получится тяжелее, то ненамного. В любом случае стоит обращать внимание на длину и симметричность лучей. Длина лучей выбирается исходя из диаметра используемых пропеллеров, так, чтобы после их установки расстояние между окружностями вращающихся винтов было не менее 1–2 см, и уж тем более эти окружности не должны пересекаться. Моторы, устанавливаемые на лучах, должны быть равноудалены от центра рамы, где будет располагаться «мозг», и (в большинстве случаев) находиться на одном расстоянии друг от друга, образуя равносторонний многоугольник.
При проектировании стоит учесть, что центр рамы должен совпадать с центром тяжести, поэтому установить аккумулятор сзади между лучами - плохая идея, если он не будет скомпенсирован грузом спереди, например камерой. Продумай, на что будет приземляться твой аппарат, для новичков можно посоветовать приспособить что-то мягкое на «пузе» или концах лучей, например плотный поролон или теннисные мячики. А также защити аккумулятор на случай неудачного приземления, например установи его между пластинами рамы или расположи под высокими посадочными лыжами.
info
Полет от первого лица (FPV) очень захватывает, особенно если пользоваться видео-очками и HeadTracker’ом, который будет повторять движения головы на подвесе FPV-камеры, создавая ощущение, что находишься в кабине пилота.
Моторы и пропеллеры
Из-за вращения моторов в разные стороны приходится использовать разнонаправленные пропеллеры: прямого вращения (против часовой) и обратного вращения (по часовой). Обычно используются двухлопастные пропеллеры, их легче балансировать и найти магазинах, в то время как трехлопастные дадут больше тяги при меньшем диаметре винта, но доставят много головной боли при балансировке. Плохой (дешевый и неотбалансированный) пропеллер может развалиться в полете или вызвать сильные вибрации, которые передадутся на датчики полетного контроллера. Это приведет к серьезным проблемам со стабилизацией и вызовет сильное смазывание и «желе» на видео, если ты снимаешь что-то с коптера или летаешь с видом от первого лица.
Регулятор скорости,он же ESC
У любого пропеллера есть два основных параметра: диаметр и шаг. Их обозначают по-разному: 10 × 4.5, 10 × 45 или просто 1045. Это означает, что диаметр пропеллера 10 дюймов, а его шаг 4,5 дюйма. Чем длиннее пропеллер и больше шаг, тем большую тягу он сможет создавать, но при этом повысится нагрузка на мотор и увеличится потребление тока, в результате он может сильно перегреться и электроника выйдет из строя. Поэтому винты подбираются под мотор. Ну или мотор под винты, тут как посмотреть. Обычно на сайтах продавцов моторов можно встретить информацию о рекомендуемых пропеллерах и аккумуляторах для выбранного мотора, а также тесты создаваемой тяги и эффективности. Существуют и пропеллеры с изменяемым шагом, что в теории повысит маневренность, но в реальности добавит сложную механику, имеющую свойство изнашиваться и ломаться с последующим дорогостоящим ремонтом.
Также чем больше винт, тем больше его инерция. Если нужна маневренность, лучше выбрать винты с большим шагом или трехлопастные. Они при том же размере создают тягу в 1,2–1,5 раза больше. Понятно, что винты и скорость их вращения нужно подбирать так, чтобы они смогли создать тягу большую, чем вес аппарата.
И наконец, бесколлекторные моторы. У моторов есть ключевой параметр - kV. Это количество оборотов в минуту, которые сделает мотор, на поданный вольт напряжения. Это не мощность мотора, это его, скажем так, «передаточное число». Чем меньше kV, тем меньше оборотов, но выше крутящий момент. Чем больше kV при той же мощности, тем больше оборотов и ниже момент. При выборе мотора ориентируются на то, что в штатном режиме он будет работать при мощности 50% от максимальной. Не стоит думать, что чем kV больше - тем лучше, для коптеров с типичной 3S-батареей рекомендуемое число находится в диапазоне от 700 до 1000 kV.
info
Более прочный материал - дюраль (Д16Т). Практически не гнется, достаточно пружинистый, и его применяют в авиации. Профили из него в ОБИ не продаются, но можно поймать на Митинском рынке на третьем этаже, на рынке ТВЦ «Строй» тоже были.
Питание и контроллеры питания
Капитан подсказывает: чем больше мощность мотора, тем больше батарейка ему нужна. Большая батарейка - это не только емкость (читай, время полета), но и максимальный ток, которая она отдает. Но чем больше батарейка, тем больше и ее вес, что вынуждает скорректировать наши прикидки относительно винтов и моторов. На сегодняшний день все используют литий-полимерные батарейки (LiPo). Они легкие, емкие, с высоким током разрядки. Единственный минус - при отрицательных температурах работают плохо, но если их держать в кармане и подключать непосредственно перед полетом, то во время разряда они сами слегка разогреваются и не успевают замерзнуть. LiPo-элементы вырабатывают напряжение 3,7 В.
При выборе батареи стоит обращать внимание на три ее параметра: емкость, измеряемую в миллиампер-часах, максимальный ток разряда в емкостях аккумулятора (С) и число ячеек (S). Первые два параметра связаны между собой, и при их перемножении ты узнаешь, сколько тока сможет отдавать этот аккумулятор продолжительное время. Например, твои моторы потребляют 10 А каждый и их четыре штуки, а батарея имеет параметры 2200 мА · ч 30/40C, таким образом, коптеру требуется 4 10 A = 40 A, а батарея может выдавать 2,2 A 30 = 66 A или 2,2 А 40 = 88 А в течение 5–10 секунд, что явно будет достаточно для питания аппарата. Также эти коэффициенты напрямую влияют на вес аккумулятора. Внимание! Если тока будет не хватать, то в лучшем случае батарея надуется и выйдет из строя, а в худшем загорится или взорвется; это же может произойти при коротком замыкании, повреждении или неправильных условиях хранения и зарядки, поэтому используй специализированные зарядные устройства, аккумуляторы храни в специальных негорючих пакетах и летай с «пищалкой», которая предупредит о разрядке. Число ячеек (S) указывает на количество LiPo-элементов в батарее, каждый элемент выдает 3,7 В, и, например, 3S-аккумулятор будет отдавать примерно 11,1 В. Стоит обращать внимание на этот параметр, так как от него зависят скорость оборотов моторов и тип используемых регуляторов.
Элементы батареи объединяют последовательно или параллельно. При последовательном включении увеличивается напряжение, при параллельном - емкость. Схему подключения элементов в батарее можно понять по ее маркировке. Например, 3S1P (или просто 3S) - это три последовательно подключенных элемента. Напряжение такой батареи будет 11,1 В. 4S2P - это восемь элементов, две группы, подключенных параллельно по четыре последовательных элемента.
Однако моторы подключаются к батарее не напрямую, а через так называемые регуляторы скорости. Регуляторы скорости (они же «регули» или ESC) управляют скоростью вращения моторов, заставляя твой коптер балансировать на месте или лететь в нужном направлении. Большинство регуляторов имеют встроенный стабилизатор тока на 5 В, от которого можно питать электронику (в частности, «мозг»), можно использовать отдельный стабилизатор тока (UBEC). Выбираются контроллеры скорости исходя из потребления мотором тока, а также возможности перепрошивки. Обычные регули довольно медлительны в плане отклика на поступающий сигнал и имеют множество лишних настроек для коптеростроительства, поэтому их перепрошивают кастомными прошивками SimonK или BLHeli. Китайцы и тут подсуетились, и часто можно встретить регуляторы скорости с уже обновленной прошивкой. Не забывай, что такие регули не следят за состоянием аккумулятора и могут разрядить его ниже 3,0 В на банку, что приведет к его порче. Но в то же время на обычных ESC стоит переключить тип используемого аккумулятора с LiPo на NiMH или отключить уменьшение оборотов при разрядке источника питания (согласно инструкции), чтобы под конец полета внезапно не отключился мотор и твой беспилотник не упал.

Моторы подключаются к регулятору скорости тремя проводами, последовательность не имеет значения, но если поменять любые два из трех проводов местами, то мотор будет вращаться в обратном направлении, что очень важно для коптеров.
Два силовых провода, идущих от регулятора, надо подключить к батарейке. НЕ ПЕРЕПУТАЙ ПОЛЯРНОСТЬ! Вообще, для удобства регуляторы подключают не к самой батарейке, а к так называемому Power Distribution Module - модулю распределения энергии. Это, в общем-то, просто плата, на которой припаяны силовые провода регуляторов, распаяны разветвления для них и припаян силовой кабель, идущий к батарее. Конечно, батарею не надо припаивать, а надо соединить через разъем. Ты же не хочешь перепаивать батарею каждый раз, как она сядет.
Бортовой компьютер и сенсоры
Выбор полетных контроллеров для коптеров очень велик - начиная от простого и дешевого KapteinKUK и нескольких open source проектов под Arduino-совместимые контроллеры до дорогого коммерческого DJI Wookong. Если ты настоящий хакер, то закрытые контроллеры тебя не должны сильно интересовать, в то время как открытые проекты, да еще и основанные на популярной ардуинке, привлекут многих программистов. О возможностях любого полетного контроллера можно судить по используемым в нем датчикам:
Гироскоп позволяет удерживать коптер под определенным углом и стоит во всех контроллерах; акселерометр помогает определить положение коптера относительно земли и выравнивает его параллельно горизонту (комфортный полет); барометр дает возможность удерживать аппарат на определенной высоте. На показания этого датчика очень сильно влияют потоки воздуха от пропеллеров, поэтому стоит прятать его под кусок поролона или губки; компас и GPS вместе добавляют такие функции, как удержание курса, удержание позиции, возврат на точку старта и выполнение маршрутных заданий (автономный полет). К установке компаса стоит подойти внимательно, так как на его показания сильно влияют расположенные рядом металлические объекты или силовые провода, из-за чего «мозги» не смогут определить верное направление движения; сонар или УЗ-дальномер используется для более точного удержания высоты и автономной посадки; оптический сенсор от мышки используется для удержания позиции на малых высотах; датчики тока определяют оставшийся заряд аккумулятора и могут активировать функции возврата на точку старта или приземление.
Сейчас существует три основных открытых проекта: MultiWii, ArduCopter и его портированная версия MegaPirateNG. MultiWii самый простой из них, для запуска требует Arduino с процессором 328p, 32u4 или 1280/2560 и хотя бы одним датчиком-гироскопом. ArduCopter - проект, напичканный всевозможным функционалом от простого висения до выполнения сложных маршрутных заданий, но требует особого железа, основанного на двух чипах ATmega. MegaPirateNG - это клон ArduCopter, который способен запускаться на обычной ардуине с чипом 2560 и минимальным набором датчиков из гироскопа, акселерометра, барометра и компаса. Поддерживает все те же возможности, что и оригинал, но всегда догоняет в развитии.
Продвинутый девяти-канальный пульт
С железом для открытых проектов аналогичная ситуация, как и с рамами для коптера, то есть ты можешь купить готовый контроллер или собрать его самостоятельно с нуля или на основе Arduino. Перед покупкой стоит всегда обращать внимание на используемые в плате датчики, так как развитие технологий не стоит на месте, а старье китайцам как-то надо распродать, к тому же не все сенсоры могут поддерживаться открытыми прошивками.
Наконец, стоит упомянуть еще один компьютер - PX4, отличающийся от клонов Arduino тем, что у него есть UNIX-подобная операционная система реального времени, с шеллом, процессами и всеми делами. Но надо предупредить, что PX4 - платформа новая и довольно сырая. Сразу после сборки не полетит.
Настройка полетных параметров, как и программы настройки, очень индивидуальна для каждого проекта, а теория по ней могла бы занять еще одну статью, поэтому вкратце: почти все прошивки для мультикоптеров основаны на PID-регуляторе, и основной параметр, требующий вмешательства, - пропорциональная составляющая, обозначаемая как P или rateP. Если при взлете твой коптер дергается из стороны в сторону, то это значение надо уменьшать, если же вяло реагирует на внешние воздействия, то наоборот - повышать, остальные нюансы ты сможешь найти в инструкциях и на сайтах разработчиков.
Безопасность
Все новички, думая о безопасности, вспоминают AR.Drone и его защиту винтов. Это хороший вариант, и он работает, но только на мелких и легких аппаратах, а когда вес твоего коптера начинает приближаться к двум килограммам или давно перевалил за эту цифру, то спасти может только прочная железная конструкция, которая будет весить очень много и, как ты понимаешь, сильно уменьшит грузоподъемность и автономность полета. Поэтому лучше сперва тренироваться подальше от людей и имущества, которое можно повредить, а уже по мере улучшения навыков защита станет и не нужна. Но даже если ты пилот со стажем, то не забывай о технике безопасности и продумывай возможные негативные последствия твоего полета при нештатных ситуациях, особенно при полетах в людных местах. Не стоит забывать, что сбой контроллера или канала связи может привести к тому, что аппарат улетит от тебя далеко, и тогда для поиска может пригодиться GPS-трекер, установленный заранее на коптер, или же простая, но очень громкая пищалка, по звуку которой ты сможешь определить его местоположение. Настрой и заранее проверь функцию fail safe твоего полетного контроллера, которая поможет приземлиться или вернуть коптер на точку старта при потере сигнала с пульта.
Управление
Немного про радиоаппаратуру. Сейчас практически все передатчики для летающих моделей работают на частоте 2,4 ГГц. Они достаточно дальнобойные, и этот частотный диапазон не так зашумлен, как, например, 900 МГц. Для полета вообще-то достаточно четырех каналов: газ, рыскание, тангаж, крен. Ну а восьми каналов точно хватит и на что-нибудь еще.
info
Для полетов с камерой обзаведись подвесом, который будет удерживать камеру параллельно горизонту при маневрах, а также поможет управлять наклоном камеры. Большинство контроллеров имеют выходы для стабилизации подвесов с сервоприводом, а также выход для переключателя управления кнопкой спуска камеры.
Комплект обычно состоит из самого пульта и приемника. На приемнике находятся ручки управления и дополнительные кнопки. Обычно выбирают аппаратуру Mode2, когда левый стик управляет газом и поворотом, а правый - наклонами коптера. Все ручки, кроме газа, подпружинены и возвращаются в начальное положение при отпускании. Также стоит обращать внимание на количество каналов. Для беспилотника потребуется четыре канала управления и один канал для переключения режимов полета, кроме того, могут потребоваться дополнительные каналы для управления камерой, для настройки или для особых режимов полетного контроллера. При выборе пульта стоит также учитывать возможность смены радиомодуля, чтобы в будущем его можно было легко обновить.